
Waymo’s Quiet Land Grab: Beating Tesla’s Robotaxi Tsunami to America’s Next Driverless Cities
Waymo is accelerating its robotaxi rollout into new cities like Minneapolis, Tampa, and New Orleans just as Tesla prepares a massive robotaxi push, setting up a pivotal race over who defines the future of autonomous urban mobility in the United States. While headlines often focus on Elon Musk’s promises of a “Tesla robotaxi tsunami,” Waymo is quietly executing a steady, safety‑first expansion that could lock in key markets before rival services even get regulatory approval. The next few years will determine not only which companies dominate driverless ride‑hailing, but also how quickly cities adapt to a world where human drivers are no longer the default.
Mission Overview: Waymo’s Strategic Expansion Wave
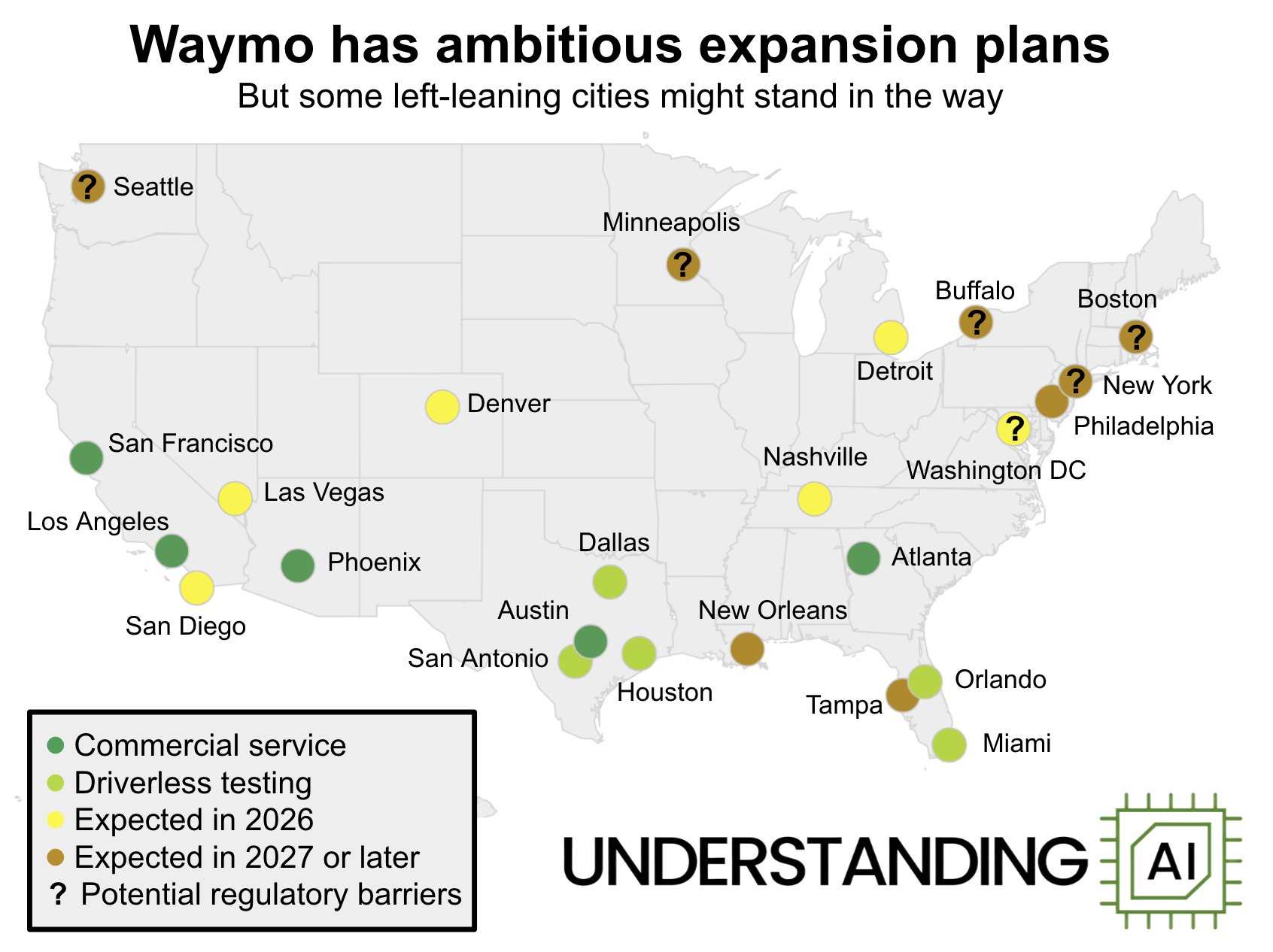
Waymo, the self‑driving technology company born from Google’s early autonomous vehicle project, has announced plans to extend its commercial robotaxi service to three new cities: Minneapolis (Minnesota), Tampa (Florida), and New Orleans (Louisiana). These locations are not random dots on a map. They represent deliberate bets on:
- Diverse weather and road conditions, from snow and ice in Minneapolis to heavy rain and flood‑prone streets in New Orleans.
- Different regulatory and political environments across the Midwest, Southeast, and Gulf Coast.
- Tourism, sports, and convention traffic that can keep utilization high and ride economics attractive.
This next phase complements Waymo’s existing hubs in Phoenix, San Francisco, Los Angeles, and Austin, where fully driverless services already operate at meaningful scale. By adding Minneapolis, Tampa, and New Orleans, Waymo is signaling its intent to go from a handful of pilot metros to a genuinely national robotaxi footprint—before Tesla and other automaker‑led approaches can fully deploy competing services.
The Competitive Context: Waymo vs. Tesla’s “Robotaxi Tsunami”
The expansion news arrives during a period of intense hype and skepticism around autonomous driving. Tesla is positioning its Full Self‑Driving (FSD) software as the platform for a future robotaxi network, promising that owners will eventually be able to deploy their vehicles into an autonomous ride‑hailing fleet. Tesla’s narrative emphasizes:
- Massive scale via millions of consumer‑owned vehicles already on the road.
- Vision‑only autonomy, relying on cameras and neural networks instead of expensive lidar.
- Over‑the‑air updates that can, in theory, rapidly upgrade the entire fleet.
Waymo, in contrast, has focused on:
- Purpose‑built robotaxi fleets (currently based on vehicles like the Jaguar I‑PACE and custom Zeekr robotaxis).
- A multi‑sensor stack combining lidar, radar, and high‑resolution cameras.
- Intensive mapping, simulation, and regulatory engagement before each expansion.
This difference in philosophy has real‑world consequences. Tesla vehicles remain SAE Level 2 systems requiring constant human supervision, while Waymo operates at Level 4 in geofenced areas, where the system is designed to handle the full driving task without a human behind the wheel. As Tesla readies its broader robotaxi ambitions, Waymo’s early operational experience and safety record may be its strongest defense against a future “tsunami” of camera‑only competitors.

Objectives of Waymo’s New City Rollout
Waymo’s push into Minneapolis, Tampa, and New Orleans supports several interlocking strategic objectives:
- Geographic diversification: Existing deployments lean heavily on Sun Belt and West Coast climates. Minneapolis introduces severe winters and snowpack. New Orleans adds humidity, storm events, and complex drainage topography. Tampa contributes a mix of suburban sprawl, tourist districts, and hurricane‑season conditions.
- Regulatory learning curve: By working with distinct state and municipal regulators, Waymo builds a playbook for obtaining approvals across a broad policy spectrum, from tech‑friendly to skeptical jurisdictions.
- Brand and trust building: Robotaxis become more “normal” when friends and relatives in far‑flung cities have used them. Expanding to culturally and geographically different metros accelerates mainstream acceptance.
- Pre‑empting competition: The first mover in fully driverless service can become the default choice for riders, city planners, and business partners. That incumbency can be hard to dislodge, even if rivals catch up technically.
- Data and model robustness: Each new environment feeds diverse edge cases back into Waymo’s simulation and training pipelines, allowing its driving models to generalize better across North America.
“Every new city is a new set of challenges: local driving cultures, weather, infrastructure, and rider expectations. Our goal is to make our system robust not just in one ideal environment, but in the wide variety of streets people actually live on.”
In practice, these objectives translate into a methodical, multi‑year rollout rather than a sudden nationwide switch. The race is not solely about speed; it is about the depth and reliability of the underlying autonomy stack.
Technology Stack: How Waymo’s Driverless System Works
At the core of Waymo’s service is the Waymo Driver, a combination of hardware and software that perceives the environment, predicts behavior, and plans safe, efficient maneuvers. The system is often described in four conceptual layers:
1. Perception
Perception is the process of transforming raw sensor data into a structured representation of the world. Waymo’s sensor suite typically includes:
- Lidar: Rotating or solid‑state laser scanners measure distance by timing the return of reflected light pulses, producing 3D point clouds that capture object shapes and positions.
- Radar: Radio waves detect larger objects and their relative velocity, often performing well in rain, dust, or low‑visibility conditions.
- Cameras: High‑resolution cameras capture color and texture, crucial for reading traffic lights, road signs, and subtle cues like pedestrian gestures.
Machine learning models fuse these inputs to identify:
- Dynamic agents (cars, buses, cyclists, pedestrians).
- Static infrastructure (curbs, lane markings, construction barriers).
- Traffic control devices (lights, signs, signals).
2. Prediction
Perception tells the system what is happening now; prediction estimates what will happen next. Waymo’s models learn typical behaviors:
- How a pedestrian near a crosswalk is likely to move.
- Whether a merging car will yield or force its way in.
- How traffic flows through complex intersections or roundabouts.
In challenging environments like New Orleans—where pedestrians, bikes, and vehicles may mix more informally—accurate prediction is essential for safe navigation.
3. Planning and Control
Planning algorithms generate a safe trajectory that respects traffic rules while remaining comfortable to riders. This includes:
- Lane selection and path planning in complicated road networks.
- Speed selection based on speed limits, traffic, and road conditions.
- Negotiation maneuvers such as unprotected left turns or merges.
Control systems then convert these plans into low‑level commands for steering, braking, and acceleration.
4. Mapping and Localization
Waymo’s vehicles operate in areas supported by high‑definition maps that capture details beyond traditional navigation maps, including lane‑level geometry and precise curb positions. Localization algorithms compare live sensor readings to these maps to estimate the vehicle’s position with high accuracy.
For cities like Minneapolis, maps must be robust to seasonal changes: snow can obscure lane markings, and infrastructure can look very different between summer and winter. Waymo addresses this through frequent map updates and perception systems that do not rely solely on painted lines.

Why Minneapolis, Tampa, and New Orleans?
The selection of Minneapolis, Tampa, and New Orleans reflects a calculated attempt to widen both technical and commercial test cases.
Minneapolis, Minnesota
Minneapolis tests the system under:
- Snow and ice: Reduced friction, obscured lane markers, and snowbanks that alter curb shapes.
- Seasonal infrastructure changes: Temporary road closures, plowing patterns, and winter parking rules.
- University and commuter traffic: High demand corridors with predictable rush hours.
Succeeding in Minneapolis could unlock similar “snow belt” markets throughout the northern United States and Canada.
Tampa, Florida
Tampa offers:
- Suburban sprawl and freeways: Long‑distance rides, airport runs, and event‑driven surges.
- Tropical weather: Heavy rain, thunderstorms, and strong sunlight conditions.
- Tourism‑driven patterns: Cruise terminals, beaches, and sports venues that favor on‑demand rides.
Tampa is also strategically located within Florida, a state that has historically been receptive to testing of advanced transportation technologies.
New Orleans, Louisiana
New Orleans introduces:
- Historic, irregular streets: Narrow rights‑of‑way, streetcars, and frequent pedestrian activity.
- Flood risk: Standing water, drainage issues, and infrastructure stress during storms.
- Event intensity: From Mardi Gras to festivals, crowd‑driven traffic patterns can stress any transportation network.
For autonomous systems, New Orleans is an ideal proving ground in complex, human‑centric urban environments where flexibility and caution are paramount.
Scientific and Societal Significance
The expansion of robotaxis into more cities is not merely a commercial maneuver; it is a large, ongoing experiment in applied artificial intelligence, human–machine interaction, and urban systems engineering.
Advancing AI and Robotics
Each new deployment contributes to:
- Data diversity: Weather, lighting, and behavior patterns differ by region, improving the training corpus for perception and prediction models.
- Robustness research: Edge cases—such as unexpected road closures or atypical driver behavior—test the limits of current AI and inspire new algorithms.
- Simulation fidelity: Real‑world incidents help calibrate and validate large‑scale simulations, which are essential for testing rare or dangerous scenarios safely.
Transportation Safety and Efficiency
Traffic accidents kill over a million people globally each year, with human error a dominant cause. Properly validated autonomous systems could:
- Reduce collisions by eliminating distracted or impaired driving.
- Smooth traffic flows through more consistent driving behavior.
- Lower congestion by enabling dynamic routing and better vehicle utilization.
Extensive deployments across varied cities are necessary to test whether these theoretical benefits translate into measurable, large‑scale safety improvements.
Equity and Accessibility
Waymo and its competitors position robotaxis as tools for:
- Improving mobility for people who cannot drive because of age, disability, or cost.
- Offering service in “transit deserts” where public transportation is sparse.
- Creating consistent, 24/7 access in areas underserved by traditional taxis.
However, equity is not automatic. Pricing, service zones, language accessibility in apps, and smartphone requirements all influence who actually benefits. Evaluating services in different socio‑economic contexts—like neighborhoods across Minneapolis, Tampa, and New Orleans—will shed light on whether autonomous mobility is narrowing or widening mobility gaps.

Key Milestones on the Road to Broad Deployment
As Waymo races to establish beachheads in new cities before Tesla and other automakers, a series of technical, regulatory, and operational milestones will determine the trajectory.
- Initial testing with safety operators: Early operations in a city typically begin with human safety drivers behind the wheel, even when the autonomy stack handles most driving tasks. This builds local data and demonstrates baseline safety.
- Permit approvals for driverless service: Regulatory agencies assess safety performance, incident reports, and operational plans before authorizing fully driverless rides without a human in the vehicle.
- Rider‑only pilots: Select riders gain access to fully driverless rides, often by invitation and within carefully defined service zones and hours.
- Commercial scaling: Once confidence is established, service areas expand, wait times drop, and pricing can be optimized for broader adoption.
- Integration with public transit and events: Deep integration with transit hubs, stadiums, airports, and major events can transform robotaxis from a novelty into essential infrastructure.
Watching how quickly each new city moves through these stages will provide a real‑time barometer of both public trust and the maturity of the technology.
Challenges and Risks on the Path to Scale
Despite impressive technical progress, autonomous ride‑hailing faces significant hurdles. For Waymo, the race to expand before a Tesla robotaxi wave intensifies these pressures.
Technical Complexity
- Long‑tail events: Unexpected road behavior, such as unconventional traffic‑control by police, temporary detours, or unusual pedestrian behavior during festivals, can strain current models.
- Adverse weather: Snow, heavy rain, and fog remain demanding conditions. Minneapolis and Tampa will be especially important proving grounds.
- Cybersecurity: As fleets become more connected, protecting vehicles from hacking or malicious interference is essential for safety and public confidence.
Regulation and Public Perception
- Inconsistent rules: Autonomous driving regulations vary widely between states and municipalities, complicating nationwide deployment strategies.
- Incident sensitivity: High‑profile crashes—even rare ones—can trigger moratoria or stricter rules, slowing deployment schedules across multiple markets.
- Labor and economic concerns: Taxi drivers, ride‑hail drivers, and related workers may resist rapid automation, influencing local politics and regulations.
Competitive Pressure
Waymo faces not only Tesla but also Cruise (GM), Motional, Zoox, and emerging players from Asia and Europe. Tesla’s advantage is its vast installed base and brand recognition; Waymo’s is its multi‑year head start in Level 4 operations. The outcome will depend on:
- Which model scales faster without compromising safety.
- How regulators evaluate Level 2+ systems versus fully driverless Level 4 deployments.
- How quickly public trust accrues to one brand or technology stack over another.
Future Outlook: A Gradual, Uneven Robotaxi Revolution
Looking ahead, the “tsunami” metaphor for Tesla’s robotaxi ambitions captures one plausible future: a rapid, software‑driven expansion of autonomy across millions of vehicles. Yet the reality on the ground is more likely to resemble a patchwork of carefully regulated islands of Level 4 service, expanding stepwise as technology, infrastructure, and public trust mature.
Waymo’s announcements about Minneapolis, Tampa, and New Orleans fit that more incremental pattern. By the late 2020s, it is plausible that:
- Dozens of U.S. cities host commercial, rider‑only robotaxi services from multiple operators.
- Autonomous ride‑hailing becomes a standard option in mobility apps, alongside public transit and micromobility.
- Regulators adopt more harmonized frameworks, enabling smoother cross‑state expansion.
In this scenario, Tesla’s strengths in manufacturing, battery cost, and consumer branding may complement rather than fully replace dedicated robotaxi fleets. Some cities might even host both Tesla owner‑operated robotaxis and centralized fleets like Waymo’s, each optimized for slightly different use cases.
The key question is not whether robotaxis are coming—they already exist in commercially meaningful deployments—but how quickly they move from early‑adopter novelty to everyday infrastructure, and which companies are trusted to run them.

Conclusion: Waymo’s Quiet Race Against the Clock
The announcement of Waymo’s expansion into Minneapolis, Tampa, and New Orleans is more than just another corporate press release; it is a visible marker of an intensifying race to define the operating system of future cities. On one side, Tesla promises a software‑first, camera‑only revolution powered by millions of privately owned cars. On the other, Waymo continues to build carefully curated, safety‑validated driverless fleets, city by city.
By targeting diverse climates, regulatory regimes, and urban forms, Waymo is testing whether its autonomy stack can become a generalized platform for North American mobility rather than a niche service confined to a few sunny metros. The outcome of this strategy will help determine:
- How quickly human driving becomes optional in everyday urban travel.
- Whether autonomous services live up to their promises of improved safety and accessibility.
- Which companies—and regulatory philosophies—shape the rules of the driverless road.
For now, the robotaxi future is arriving unevenly, one city at a time. If Waymo can successfully navigate snow‑covered Minneapolis streets, storm‑soaked Tampa highways, and the dense, historic neighborhoods of New Orleans, it will be far better positioned to withstand any coming robotaxi “tsunami” and perhaps to lead it.
References / Sources
- Waymo Official Blog – https://blog.waymo.com/
- Waymo – Safety and Technical Overview – https://waymo.com/safety/
- Waymo – The Waymo Driver Technology – https://waymo.com/tech/
- Tesla – Autonomy and Full Self‑Driving – https://www.tesla.com/autopilot
- National Highway Traffic Safety Administration (NHTSA) – Automated Vehicles for Safety – https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety
- SAE International – Taxonomy and Definitions for Terms Related to Driving Automation Systems – https://www.sae.org/standards/content/j3016_202104/
- NextBigFuture – Technology and Future Trends Coverage – https://www.nextbigfuture.com/
