
Waymo’s Quiet Land Grab: Expanding Robotaxis Before Tesla’s Big Reveal
Waymo Racing to New Cities Before the Tesla Robotaxi Tsunami
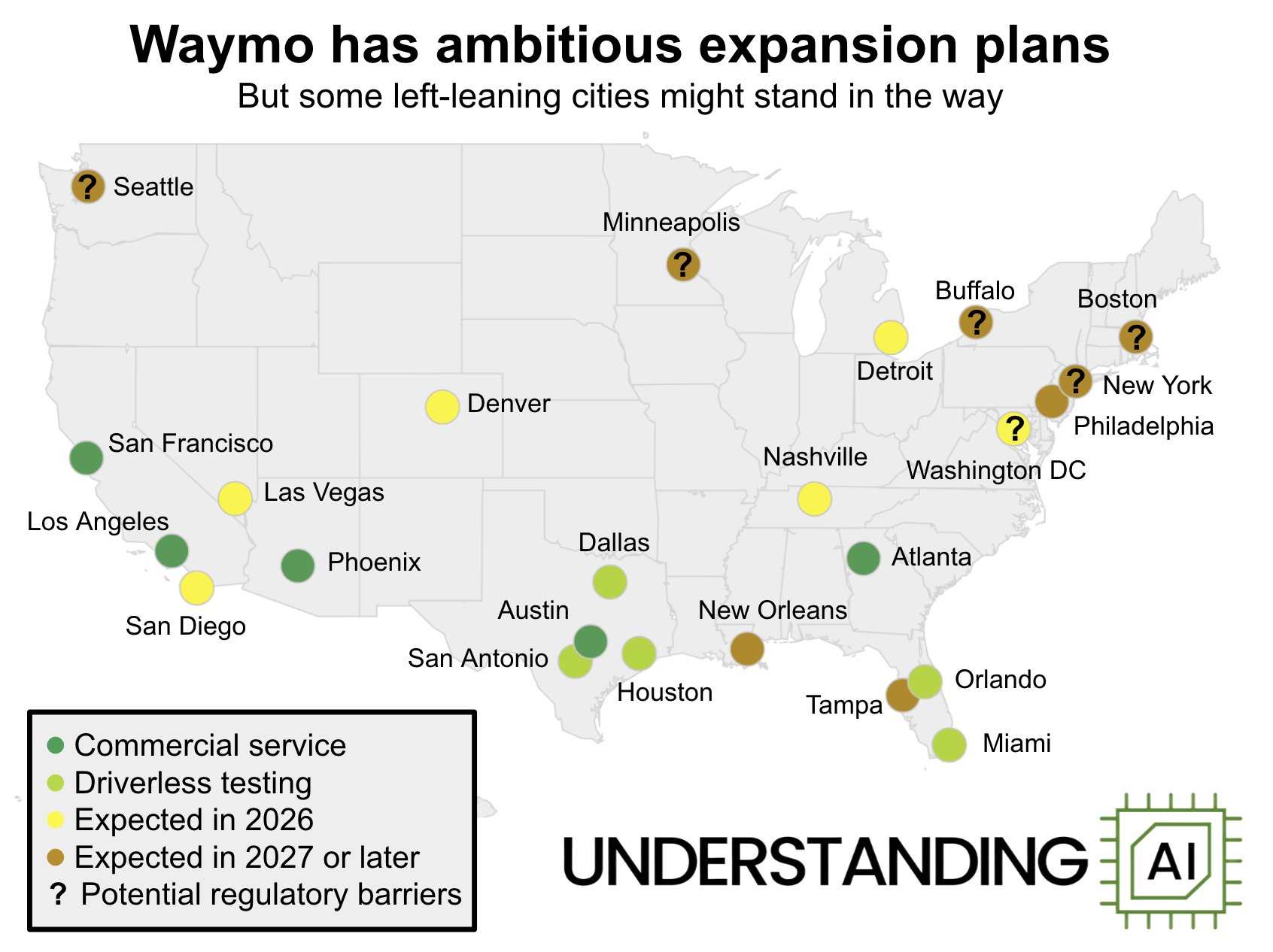
Waymo is rapidly expanding its fully driverless robotaxi services into new cities, including Minneapolis, Tampa, and New Orleans, in a strategic push to lock in data, public trust, and regulatory goodwill before Tesla attempts to unleash its long‑promised robotaxi network. This expansion marks a pivotal moment in the autonomous vehicle (AV) race: two fundamentally different philosophies of self‑driving—Waymo’s sensor‑rich robo‑chauffeur versus Tesla’s vision‑first “software eats the car” approach—are converging on the same goal of large‑scale autonomous mobility.
This article examines Waymo’s latest city rollout plans, the technology and operations behind its robotaxi service, how its strategy contrasts with Tesla’s, the implications for urban transportation and safety, and the key technical, economic, and regulatory challenges that will shape who wins the first mainstream wave of autonomous ride‑hailing.
Mission Overview: Why Waymo Is Moving So Fast
Waymo, a subsidiary of Alphabet, has evolved from Google’s experimental self‑driving car project into one of the world’s most advanced commercial autonomous driving platforms. After years of limited pilots in Phoenix and parts of California, the company is now signaling a new, more aggressive phase: multi‑city scale‑out across diverse climates, road cultures, and regulatory environments.
Recent announcements indicate plans to expand into:
- Minneapolis–Saint Paul – A cold‑weather, snow‑prone metro ideal for testing winter robustness.
- Tampa Bay – With complex freeway interchanges, tourism-driven demand, and subtropical rain.
- New Orleans – Featuring dense urban streets, festivals, and flood‑prone infrastructure.
These cities complement existing operating areas such as Phoenix, San Francisco, Los Angeles, and Austin, helping Waymo gather a rich, heterogeneous driving dataset. For AV systems, extensive exposure to edge cases—unusual weather, local driving norms, road layouts, and infrastructure quirks—is essential to improving safety and reliability.
Strategically, Waymo is racing the clock. Tesla has announced ambitious plans for a global “Tesla Network” of vehicles that can operate as robotaxis, with a major robotaxi reveal expected to reset expectations about cost, scale, and software‑centric autonomy. Waymo’s bet is that being first to deploy a mature, regulator‑trusted, fully driverless ride‑hailing service in multiple U.S. metros will provide a durable lead in:
- Public trust – Familiarity with safe driverless rides.
- Regulatory comfort – Proven safety records with local authorities.
- Operational learning – Real‑world logistics and fleet optimization data.
- Brand position – Becoming synonymous with “safe robotaxis” before Tesla enters in force.
The Emerging Robotaxi Fleet
Waymo’s latest deployments rely primarily on modified Jaguar I‑PACE EVs and electric Waymo One branded vehicles equipped with its fifth‑generation sensor suite. Visualizing this configuration helps clarify the technology gap between Waymo and Tesla.
The image above captures the strategic shift: autonomous fleets are transitioning from a handful of test neighborhoods to broader, city‑wide coverage maps. Each new city adds not only potential riders but also new operational constraints that sharpen the maturity of the stack.
Technology Stack: How Waymo’s Driver Works
Waymo’s approach is often summarized as “sensor‑heavy, safety‑first, HD‑map‑driven autonomy.” Compared with Tesla’s camera‑focused method, Waymo invests heavily in diverse sensors and detailed prior knowledge of the environment. Its stack can be broken into four major technical layers.
1. Perception: Seeing the World in 3D
Waymo vehicles use a combination of:
- LiDAR – Multiple spinning and solid‑state LiDAR units generate dense 3D point clouds, directly measuring distance and shape of surrounding objects.
- Radar – Penetrates rain, fog, and dust, providing robust velocity and range data for moving objects.
- Cameras – High‑resolution cameras capture color, texture, and fine detail for object classification (pedestrians, traffic lights, signs, lane markings).
- Ultrasonics – Short‑range sensing for precise maneuvers like curbside pickup and drop‑off.
Fusing these streams, the perception system builds an evolving 3D representation of the scene: where all relevant actors are, what they are, and how they are likely to move in the next few seconds.
2. HD Maps and Localization
Unlike human drivers who rely mostly on on‑the‑fly perception, Waymo’s vehicles operate atop centimeter‑level high‑definition (HD) maps. These maps encode:
- Lane geometries and connectivity.
- Traffic light and sign locations.
- Speed limits and road rules.
- Complex intersection layouts and turn restrictions.
Waymo vehicles localize themselves precisely within these maps using LiDAR reflections and visual features. This reduces uncertainty and enables more confident planning, especially at tricky intersections and unprotected turns.
3. Prediction and Planning
Once the environment is perceived and the vehicle is localized, Waymo’s “brain” must:
- Predict the short‑term future trajectories of other actors—drivers, cyclists, pedestrians, scooters.
- Plan a safe, comfortable, and legal trajectory for the robotaxi itself.
Waymo leverages deep learning models trained on millions of miles of human driving and billions of simulated miles to infer patterns such as:
- Which car is likely to cut in at the last moment.
- How pedestrians behave at certain types of crosswalks.
- When another driver is yielding versus inching forward aggressively.
The motion planner then evaluates numerous potential paths, optimizing for multiple objectives:
- Safety – Avoid collisions and near‑misses with high margin.
- Comfort – Minimize harsh braking and lateral jerk.
- Legality – Respect traffic laws and local norms.
- Efficiency – Reasonable travel times and route choices.
4. Systems Engineering and Redundancy
Beyond AI models, a major differentiator for Waymo is system‑level engineering. Its vehicles include:
- Redundant compute paths for critical decisions.
- Backup braking and steering mechanisms.
- Independent power systems for sensors and actuation.
- Continuous onboard diagnostics and health monitoring.
These redundancies are fundamental for achieving automotive safety integrity levels that regulators will accept for widespread driverless operation.
Waymo vs Tesla: Two Philosophies of Autonomy
To understand why Waymo is accelerating city expansions, it helps to contrast its strategy with Tesla’s anticipated robotaxi push. Though both aim at fully autonomous mobility, their assumptions and constraints are almost mirror opposites.
“Different automated driving system developers are pursuing different designs and business models, leading to a diversity of approaches to safety cases and deployment.” – Interpreting themes from U.S. DOT AV guidance.
Waymo’s Approach
- Primary business model: Dedicated robotaxi fleets (Waymo One) and logistics (Waymo Via, though currently de‑emphasized).
- Hardware strategy: Custom sensor suites with LiDAR, radar, and cameras on selected vehicles.
- Geofence strategy: Operate fully driverless only in well‑mapped, regulator‑approved operating domains.
- Scaling path: City‑by‑city expansion, each with tailored maps, testing, and safety cases.
Tesla’s Approach
- Primary business model: Sell cars to consumers with a software‑upgradable autonomy stack; later enable a distributed robotaxi network.
- Hardware strategy: Vision‑dominant; cameras plus neural network–centric inference on custom chips, with no LiDAR.
- Geofence strategy: Aim for generalized, “go‑anywhere” autonomy using end‑to‑end learning from camera inputs.
- Scaling path: Leverage millions of customer vehicles to collect data and, in theory, become robotaxis overnight via software update in compliant jurisdictions.
In effect, Waymo is betting that depth and safety in constrained operating domains will win regulators, while Tesla is betting that breadth and scale via a vast fleet will dominate once the technology is robust. Waymo’s rush into new cities before a Tesla robotaxi launch is an attempt to narrow Tesla’s greatest potential advantage—its installed base of vehicles—by building a strong, safety‑validated alternative narrative in the public mind.

Why Minneapolis, Tampa, and New Orleans Matter
On the surface, Minneapolis, Tampa, and New Orleans look like ordinary U.S. metros, but each presents unique technical and operational challenges that are highly valuable for maturing an AV system.
Minneapolis–Saint Paul: The Winter Lab
Operating safely in snow and ice is one of the most difficult tasks for autonomous vehicles. Snow degrades lane markings, changes road friction, and introduces glare and sensor noise. Minneapolis offers:
- Heavy snowfall and mixed ice/snow pack through much of winter.
- Frequent plowing, leading to changing curb and lane boundaries.
- Sub‑zero temperatures that test hardware reliability and battery performance.
Successful, reliable winter operation would significantly differentiate Waymo from competitors whose systems degrade or disengage under adverse weather.
Tampa Bay: Freeways, Tourists, and Subtropical Storms
Tampa’s metro area is characterized by a mix of:
- High‑speed freeway corridors with complex interchanges.
- Suburban sprawl demanding efficient routing over longer distances.
- Sudden, intense rainfall and thunderstorms that challenge perception systems.
- Seasonal spikes in tourism, altering traffic patterns.
Mastering this environment strengthens Waymo’s long‑distance routing, freeway behavior, and wet‑weather robustness—key for future expansions across the southeastern United States.
New Orleans: Dense Urban Streets and Event Chaos
New Orleans poses a different class of problem:
- Narrow, historic streets with non‑standard geometry.
- Frequent large events such as Mardi Gras, parades, and festivals.
- Unpredictable pedestrian behavior in entertainment districts.
- Flood‑prone areas that may become temporarily impassable.
Learning to handle dynamic road closures, temporary traffic control, and highly variable pedestrian densities will prepare Waymo for similarly complex downtowns worldwide.
Operational Model: From Pilot to Scaled Robotaxi Service
Deploying AVs into a new city is not just a software push; it is a multi‑phase, operations‑heavy process that can take years from initial mapping to fully driverless rides for the general public.
1. Mapping and Data Collection
The first phase involves sending manually driven mapping vehicles to capture HD data:
- High‑resolution LiDAR scans of streets.
- 360‑degree camera imagery for lane markings, signs, and landmarks.
- Precise GPS and inertial data for map alignment.
These raw datasets are processed into HD maps and semantic layers that encode traffic rules and road topology.
2. Safety Operators and Early Rider Programs
Next, Waymo deploys vehicles with trained human safety operators behind the wheel. During this stage, it evaluates:
- How the AV stack handles local quirks.
- Frequency and nature of disengagements (when the human must take over).
- Interactions with local human drivers, cyclists, and pedestrians.
After the system demonstrates stable performance, Waymo may open an early rider program where select users—often under NDA—can ride for free or reduced cost while providing feedback.
3. Fully Driverless Commercial Service
Once regulators approve and the safety metrics are strong, Waymo transitions to a fully driverless, commercial robotaxi service, typically via its Waymo One app. The service footprint usually begins with:
- Defined operating hours (for example, daytime only at first).
- Specific neighborhoods and corridors.
- Gradual broadening of pickup and drop‑off zones.
Pricing models may start by undercutting traditional ride‑hailing in some markets or match them while emphasizing safety and reliability.

Scientific and Societal Significance
The race between Waymo and Tesla is not just an industry rivalry; it is an experiment in how AI‑driven systems integrate into human environments and reshape urban life. Several domains of science and engineering converge in this deployment.
1. Safety and Human Factors
One of the most cited motivations for AVs is safety. Human error contributes to the vast majority of road fatalities. If AVs can demonstrably cut crash rates, the impact would be profound. Waymo’s multi‑city deployments create opportunities to measure:
- Crash and near‑miss rates compared with human drivers under similar conditions.
- Changes in risky behaviors like drunk driving and distracted driving.
- How human drivers adapt their behavior around robotaxis over time.
Human factors research will also examine trust: do passengers feel safer with machines or humans behind the wheel in various contexts?
2. Machine Learning and Generalization
Each new city acts as a testbed for generalization—whether learned models transfer from one environment to another. Research questions include:
- How quickly can perception models adapt to new signage, road markings, and vehicle types?
- Can behavioral prediction models learned in Phoenix or San Francisco generalize to Minneapolis or New Orleans?
- How much domain‑specific fine‑tuning is needed before safety plateaus?
3. Urban Planning and Transportation Systems
Large‑scale robotaxi deployment may influence:
- Car ownership patterns – If robotaxis are cheap, reliable, and widely available, households may forgo owning a second car.
- Public transit usage – AVs could complement or compete with buses and light rail, depending on pricing and integration.
- Parking demand – Reduced need for parking near city centers if vehicles can reposition or serve multiple riders.
Cities like Minneapolis, Tampa, and New Orleans provide different baselines—from transit‑light suburbs to tourist cores—enabling comparative studies of AV impacts.

Key Milestones and Metrics to Watch
As Waymo accelerates its expansion and Tesla moves closer to a robotaxi reveal, several milestones will signal how the competitive landscape is evolving.
Deployment Milestones
- Fully driverless operations (no human in the driver’s seat) launched in each new city and expanded time windows (night, bad weather).
- Service area growth – Expansion from limited neighborhoods to whole metro regions.
- Airport access – Permission to pick up and drop off at major airports, which are high‑value, complex environments.
Safety and Performance Metrics
- Reportable crash rates per million miles compared to human drivers.
- Frequency and causes of AV disengagements.
- Regulatory filings and transparency reports released by Waymo and state agencies.
Economic Indicators
- Cost per mile of operation for Waymo vs. human‑driven ride‑hailing.
- Pricing strategies relative to Uber, Lyft, and local taxis.
- Fleet size and ride volume in each operating city.

Challenges on the Road to Mass Adoption
Despite impressive technical progress, both Waymo and Tesla face substantial obstacles before robotaxis become a routine part of everyday mobility.
1. Edge Cases and Long‑Tail Risks
No matter how many miles are driven, real‑world roads continually produce novel situations: unusual construction patterns, unexpected driver behavior, animals darting into the road, or sensor anomalies. AV developers must:
- Detect when the system is uncertain and slow or stop safely.
- Continually update models with new examples of rare events.
- Prove statistically that the residual risk is acceptably low.
2. Regulation and Liability
Regulatory frameworks are still evolving. Key open questions include:
- How to certify safety of AI‑based systems that do not rely on traditional deterministic algorithms.
- How to assign liability in mixed‑fleet crashes involving AVs and human drivers.
- What level of transparency is required regarding disengagements and incidents.
Waymo’s conservative, city‑by‑city strategy is partly designed to build regulatory trust through deep engagement with local and state authorities.
3. Economics of Scale
Robotaxis must ultimately be economically compelling:
- Capital costs for specialized hardware must be amortized over high utilization.
- Maintenance and cleaning of a high‑mileage fleet must be tightly optimized.
- Pricing must compete with or undercut human‑driven alternatives while returning a profit.
Tesla’s big bet is that consumer‑owned vehicles can double as fleet assets, reducing capital burden. Waymo, in contrast, aims to control its fleet end‑to‑end, trading higher up‑front cost for consistent quality and data.
4. Public Acceptance and Ethical Concerns
Surveys show mixed public attitudes toward AVs. Concerns range from safety to job displacement for professional drivers. Transparent safety data, clear incident handling procedures, and inclusive policymaking will be critical.
Both companies must contend with the ethical dimensions of algorithmic decision‑making on the road, such as how to handle unavoidable collisions or how to prioritize comfort versus caution in dense traffic.
Looking Ahead: A Convergence of Approaches?
Over the next decade, the contrast between Waymo and Tesla may soften as both approaches borrow from each other. Likely trends include:
- Waymo reducing HD map dependency to accelerate expansion and handle more dynamic environments.
- Tesla incorporating more explicit priors about road structure and traffic rules, even while keeping a vision‑dominant philosophy.
- Hybrid business models, where consumer‑owned vehicles can sometimes join professionally managed fleets under strict quality gates.
- Standardized safety metrics agreed upon by regulators, insurers, and manufacturers.
In this future, competition may shift away from “who can drive without a steering wheel first” to “who can deliver the safest, most convenient, and most affordable mobility experience in real cities, for real people.”
Conclusion: The Strategic Logic Behind Waymo’s Expansion
Waymo’s rapid move into cities like Minneapolis, Tampa, and New Orleans is not just opportunistic growth; it is a deliberate strategy to learn faster, prove safety across diverse conditions, and anchor its brand as the trusted face of robotaxis before Tesla attempts a disruptive robotaxi launch.
By investing heavily in sensing, HD maps, conservative operation, and deep cooperation with local regulators, Waymo seeks to build a moat based on demonstrated safety and operational excellence. Tesla, with its vision‑centric, software‑first approach and massive fleet, remains the looming tsunami in the background, promising scale and cost advantages if it can close the safety and reliability gap.
The outcome of this race will influence not only which company dominates autonomous ride‑hailing, but also how AI systems are integrated into public infrastructure, how cities are designed, and how societies think about the boundaries between human and machine responsibility on the road. For now, every new Waymo city is a data point—and a test—on the long road to truly autonomous urban mobility.
References / Sources
- Waymo Official Blog – Product and Deployment Announcements
- Waymo Research – Technical Papers and Safety Reports
- U.S. NHTSA – Automated Vehicles for Safety
- U.S. Department of Transportation – Automated Vehicles Guidance
- NextBigFuture – Coverage of Waymo, Tesla, and Autonomous Vehicle Trends
- Shalev‑Shwartz et al., “On the Sample Complexity of End‑to‑End Training vs. Modular Design in Autonomous Driving,” Nature (example AV systems research)
- arXiv.org – Autonomous Driving Research Papers
