
Waymo’s Quiet Land Grab: Beating Tesla’s Robotaxi Tsunami to America’s Next Cities
Waymo Racing to New Cities Before the Tesla Robotaxi Tsunami
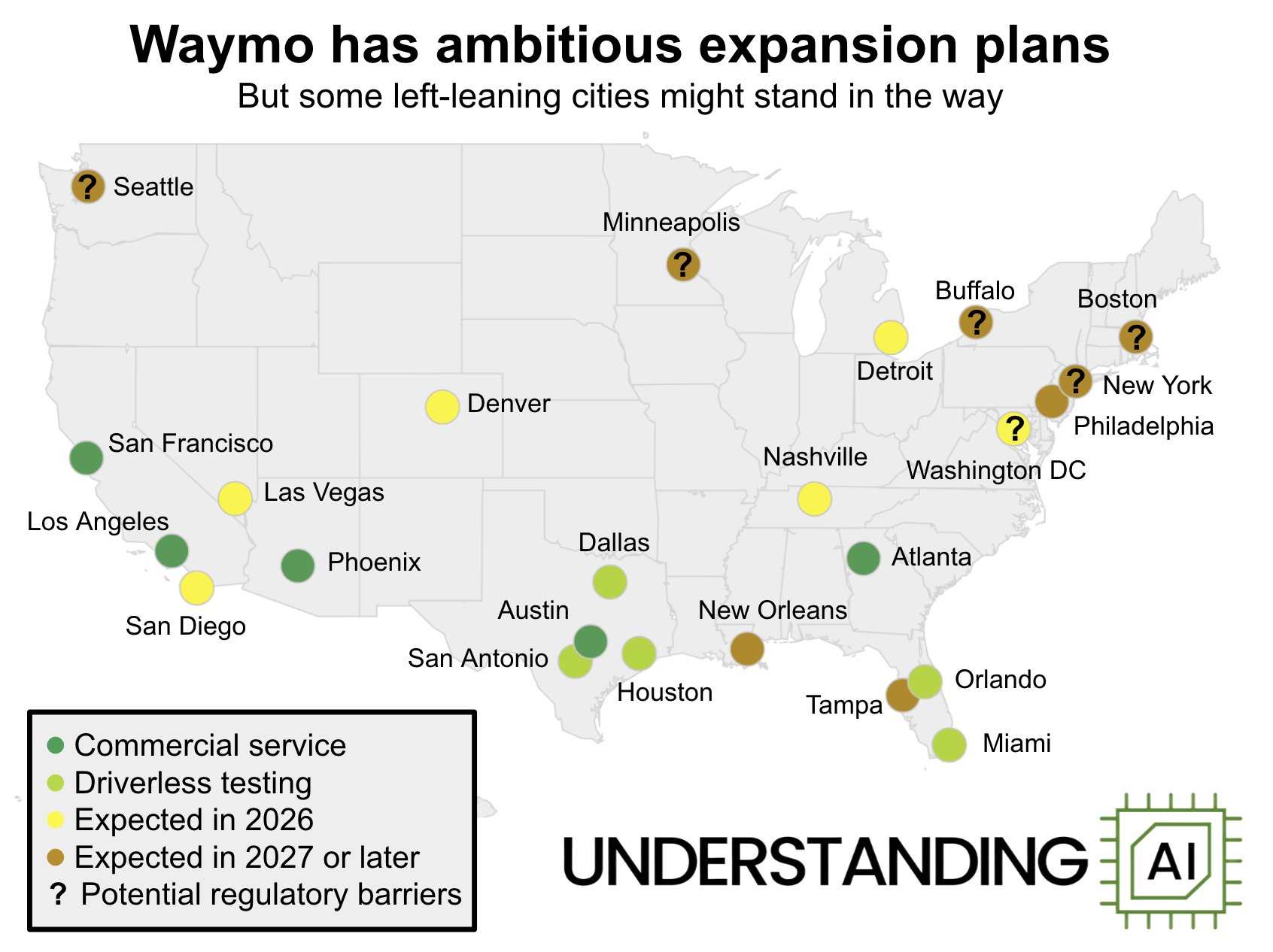
Waymo is accelerating its expansion into new U.S. cities like Minneapolis, Tampa, and New Orleans just as Tesla prepares its long-promised robotaxi platform, setting up a pivotal race between two radically different visions of autonomous mobility. This article explores Waymo’s strategy, technology stack, city-selection logic, competitive posture versus Tesla, regulatory landscape, and what this rapid scaling means for the future of urban transportation.
Alphabet’s Waymo, long seen as the methodical and safety-first counterpoint to Tesla’s aggressive “Full Self-Driving” (FSD) push, is quietly executing a land-grab strategy across American cities. Recent announcements signal a clear objective: be deeply embedded and operational in multiple metro areas before any potential “Tesla robotaxi tsunami” can reshape the market. While Tesla promises a software-first fleet of owner-operated robotaxis, Waymo is building city-centric, fully driverless ride-hailing networks that look and feel more like an AI-powered version of today’s Uber.
The result is a defining test of two philosophies:
- Waymo: Sensor-rich, lidar-based, geofenced autonomy with tight safety controls and iterative geographic rollout.
- Tesla: Camera-only, end-to-end neural networks, and ambition for global scale without dense mapping or heavy external sensors.
Mission Overview: Why Waymo Is Expanding Now
Waymo’s newly announced plans to enter cities like Minneapolis, Tampa, and New Orleans mark a significant transition from “pilot phase” to “network build-out.” After years of intensive testing in Phoenix and San Francisco, and subsequent expansion to Los Angeles and Austin, Waymo now appears focused on three intertwined goals:
- Density of operations – Building contiguous, large geofenced service areas across diverse climates and road cultures.
- Brand normalization – Making fully driverless rides feel mundane, not futuristic, to average riders.
- First-mover entrenchment – Occupying key urban markets before Tesla’s promised robotaxi network can meaningfully launch in those same areas.
Each new city is not just an incremental market; it is a training lab for Waymo’s autonomous driving system (ADS). New weather patterns, distinct road geometries, unique pedestrian behavior, and different traffic-law enforcement cultures provide crucial edge-case data. The more varied the environment, the more robust the driving policy and perception systems become.
From a strategic viewpoint, these expansions are about more than revenue. They are about:
- Regulatory proof points – Demonstrating to city, state, and federal regulators that fully driverless operation can be safe and manageable in heterogeneous environments.
- Data network effects – Using each city as a node in a larger learning graph for perception, prediction, and planning models.
- Public trust – Building a track record of low incident rates, high uptime, and consistent rider satisfaction.
Waymo’s Technology Stack vs. Tesla’s Robotaxi Vision
To understand why Waymo is racing into new cities now, it helps to dissect its technology stack and how it diverges from Tesla’s philosophy.
Waymo’s Sensor-Rich Approach
Waymo’s vehicles—currently based largely on the Jaguar I-PACE and select purpose-built platforms—are equipped with a multi-modal sensor suite:
- Lidar (Light Detection and Ranging) to produce high-resolution 3D point clouds of the environment, enabling precise distance measurements and object contours.
- Radar for robust detection of objects in adverse weather and at longer ranges, especially useful for highway and high-speed scenarios.
- High-resolution cameras providing color and texture information, essential for reading traffic lights, signs, lane markings, and subtle cues like turn signals or pedestrian gestures.
- Inertial Measurement Units (IMUs), wheel encoders, and GPS for localization and motion estimation.
This is paired with detailed, human-validated HD maps that encode:
- Lane-level geometry and topology.
- Speed limits and traffic-control information.
- Static objects such as curbs, medians, and fixed poles.
- Special infrastructure like bus lanes, rail crossings, and bike lanes.
The result is a geofenced autonomy system that works extremely well within its operational design domain (ODD): specific cities, defined weather envelopes, and predictable regulatory contexts.
Tesla’s Software-First Strategy
Tesla, by contrast, relies almost exclusively on cameras and a massive end-to-end neural network running on custom AI hardware (both on-vehicle and in its datacenters). Instead of HD maps and lidar, Tesla pursues:
- Vision-only perception trained on billions of real-world miles.
- Fleet learning, where each customer’s car sends back data that continuously refines the model.
- Aspirational generalization to almost any road on Earth without heavy pre-mapping or per-city tuning.
While Tesla’s approach is potentially more scalable and less capital-intensive per vehicle, it also faces greater scrutiny because the company allows partially automated use by human drivers on public roads, with ambiguous boundaries between driver assist and automation.
Why This Matters for City Expansion
In the near term, Waymo’s high-precision, constrained-domain approach is betting on:
- Superior predictability in specific operating environments.
- Clearer regulatory narratives about safety and control.
- Easier city partnerships because operations are geofenced and auditable.
Tesla’s still-hypothetical robotaxi network promises more “instant” geographic scalability once the core autonomy problem is solved—but reaching that threshold is technically and regulatory challenging. Waymo’s current tactic is clear: build real, functioning driverless networks in multiple cities before Tesla can turn promise into reality.

Why Minneapolis, Tampa, and New Orleans?
Waymo’s choice of Minneapolis, Tampa, and New Orleans is not arbitrary. Each city provides a distinct environmental and infrastructural challenge profile.
Minneapolis: Cold-Weather Stress Test
Minneapolis offers:
- Snow and ice that obscure lane lines, curbs, and sometimes traffic markings.
- Sub-zero temperatures that test battery resilience, sensor heating, and mechanical systems.
- Seasonal variability in traffic patterns, daylight hours, and pedestrian behavior.
Cold-weather performance has long been a key question for AVs. Snow alters the visual appearance of the world, challenges camera-based perception, and complicates lidar returns. By operating in Minneapolis, Waymo can systematically expand its ODD into more winter-prone geographies.
Tampa: Suburban Sprawl and Storms
Tampa, Florida, brings:
- Sunbelt suburban road networks with large arterials, multi-lane highways, and car-centric design.
- Heavy rain, thunderstorms, and hurricane season, stressing sensor performance and robustness.
- Tourist-heavy traffic with unfamiliar drivers and variable driving styles.
Florida has also historically been relatively open to AV pilots, which reduces regulatory friction. For Waymo, Tampa provides a valuable blend of highways, bridges, and commercial districts that differ substantially from its earlier desert and coastal metros.
New Orleans: Complex Urban Fabric
New Orleans offers:
- Narrow, historic streets with unusual geometries, one-way patterns, and frequent obstructions.
- Dense pedestrian zones, particularly in entertainment and tourism districts.
- Periodic flooding and standing water that alter drivable space and require conservative planning.
These conditions stretch the planning and prediction modules of Waymo’s stack. Navigating mixed traffic, jaywalking pedestrians, and frequent temporary closures forces the system to reason less about rigid rules and more about dynamic negotiation.
Operational Model: Robotaxi as a Service
Waymo’s business model today is effectively an autonomous ride-hailing service that resembles a premium, predictable Uber-like experience. In expanding to more cities ahead of Tesla’s robotaxis, the company is refining key operational levers.
Fleet and Dispatch
Waymo operates centralized fleet management:
- Vehicle dispatch optimized for wait time, route efficiency, and demand hotspots.
- Charging strategies balancing utilization versus downtime.
- Remote operations centers that can provide limited human assistance (e.g., handling rare edge cases via high-level guidance, without full teleoperation.
As cities accumulate, cross-city load balancing and shared analytics become increasingly important. Over time, fleet intelligence can shift cars between metro areas based on events, seasonal tourism, or macro demand patterns.
User Experience and Accessibility
From a rider’s perspective, Waymo aims for:
- Predictable pricing comparable to or slightly below traditional ride-hailing for many routes.
- Consistent pickup and drop-off flows, with clear instructions in the app and at-curb guidance.
- Safety transparency, including incident reporting, trip logs, and contact channels.
In line with WCAG 2.2 and broader accessibility principles, the app and in-vehicle interfaces increasingly support:
- Screen reader compatibility.
- High-contrast visual modes and large text options.
- Non-visual cues inside the car (e.g., audio prompts and haptic feedback) for key events like door opening or arrival.

Scientific and Technological Significance
Waymo’s expansion is not just a business story; it is a large-scale, real-world experiment in applied AI, robotics, and complex systems engineering.
Perception and Sensor Fusion
Each new city introduces new textures, architectures, signage styles, and driver behaviors. This provides:
- Rich training data for object detection, segmentation, and tracking networks.
- Improved domain adaptation, as neural models learn to generalize from Phoenix-style suburbs to Minneapolis snow or New Orleans’ French Quarter.
- Better sensor fusion algorithms, combining the strengths of lidar, radar, and cameras under varying conditions.
Prediction and Planning
One of the most challenging aspects of autonomous driving is predicting the future trajectories of:
- Other vehicles (aggressive lane-changers, cautious drivers, delivery trucks).
- Pedestrians, cyclists, and micromobility users.
- Occasional irregular actors like scooters, pets, or service vehicles.
Waymo uses machine learning-based prediction models that output probability distributions over future motions of actors. These predictions feed into a motion planner that must:
- Remain robust to worst-case scenarios.
- Be comfortable for human passengers (avoiding jerky maneuvers).
- Stay lawful while still handling ambiguous situations (e.g., temporarily crossing solid lines to pass obstructions where local custom allows).
Testing in multiple cities forces these systems to be less brittle and more behaviorally nuanced.
Safety Engineering and Redundancy
Waymo embeds multiple layers of redundancy:
- Independent perception channels (e.g., lidar and camera) cross-check one another.
- Fail-safe behaviors: if uncertainty spikes, the vehicle slows, pulls over, or requests remote support.
- Health monitoring for brakes, steering, compute, and networking—ensuring that any single-point failure triggers a safe stop.
The more environments Waymo operates in, the more stress-tested these safety architectures become, yielding valuable empirical data for regulators and standards bodies.
Regulatory Landscape and Public Trust
Scaling robotaxis is fundamentally a regulatory and social-acceptance challenge as much as a technical one. Waymo’s timing and city choices are influenced by multiple layers of governance.
State and Local Frameworks
Different states have varying maturity in autonomous-vehicle regulation:
- Permit regimes for testing with safety drivers versus fully driverless operations.
- Data-reporting requirements such as disengagement reports, crash data, and incident disclosures.
- Liability and insurance rules governing who is responsible in the event of a collision.
Waymo’s deliberate expansion suggests it is targeting jurisdictions where:
- There is existing AV policy or openness to pilot programs.
- Cities are interested in innovation, economic development, and potential congestion or safety benefits.
- Infrastructure can be adapted (e.g., AV-friendly pickup zones or designated test corridors).
Contrast with Tesla’s Regulatory Path
Tesla’s approach—rolling out advanced driver-assistance software directly to consumers—has often been scrutinized by safety agencies and advocacy groups. Any eventual Tesla robotaxi service would need:
- Local approvals for commercial ride-hailing or transport services.
- Clear delineation between owner-operated use and fully driverless ride-for-hire services.
- Robust safety evidence specific to driverless mode, distinct from supervised FSD use.
Waymo is betting that by the time Tesla completes this regulatory gauntlet, Waymo will already be a recognized, trusted player across many key U.S. metros.
Economics and Competitive Dynamics
Both Waymo and Tesla are chasing a potentially enormous prize: a global market for autonomous ride-hailing and logistics that could reshape personal mobility, last-mile delivery, and even urban real estate.
Cost Structure and Scaling
Waymo’s current vehicles are expensive on a per-unit basis due to:
- Custom sensor stacks with advanced lidar and radar.
- Redundant compute, networking, and actuation systems.
- Intensive calibration and maintenance requirements.
However, this is offset by:
- Labor savings – no human driver per ride.
- Higher utilization – vehicles can operate many more hours per day than a human driver reasonably could.
- Centralized control – allowing dynamic pricing, route optimization, and fleet health management at scale.
Tesla’s Potential Advantages
If Tesla successfully realizes its robotaxi vision, it could enjoy:
- A massive installed base of vehicles that could be software-upgraded into robotaxis.
- Lower marginal hardware costs by avoiding lidar and HD mapping.
- Decentralized fleet ownership, with Tesla owners contributing their vehicles into the robotaxi network when idle.
That scenario could create a “tsunami” of supply in key cities. Waymo’s response is essentially preemption: establish deep relationships with regulators, riders, and city planners before Tesla’s network arrives.
Network Effects and Data Moats
Autonomous mobility is a classic data-network-effects market:
- More rides generate more labeled scenarios.
- Better models increase safety and comfort.
- Higher reliability attracts more riders and municipal partnerships.
Cities like Minneapolis, Tampa, and New Orleans thus act as additional training grounds and proof points. Even if their initial ride volume is modest, their diversity of conditions helps future-proof the system for broader national—and eventually international—deployment.
Key Technical and Social Challenges Ahead
Despite impressive progress, both Waymo and Tesla face formidable hurdles on the path to ubiquitous robotaxis.
Long-Tail Edge Cases
No matter how many miles are driven, rare scenarios remain:
- Unusual construction patterns or poorly marked detours.
- Emergency vehicles acting outside of normal rules.
- Complex cultural behaviors (e.g., informal yielding customs, hand signals from traffic officers).
The “long tail” of driving scenarios is effectively infinite. Robust autonomy requires not memorizing every edge case, but building generalized policies that perform gracefully even in unseen situations.
Weather and Infrastructure Variability
While expansion to Minneapolis, Tampa, and New Orleans broadens environmental coverage, global-scale AV networks must handle:
- Heavy snow and unplowed side streets.
- Sand and dust storms in desert regions.
- Mixed-quality infrastructure, from pristine highways to pothole-ridden local roads.
These challenges intersect with infrastructure policy: cities may need to standardize markings, maintain digital twins of road networks, and create AV-friendly corridors to fully realize the benefits of autonomy.
Public Perception and Risk Tolerance
Societal acceptance is another gating factor. Even if autonomous vehicles are statistically safer than human drivers, the public may be less tolerant of:
- Highly publicized incidents.
- Perceived opacity in how AI decides to act.
- Questions about accountability when “the driver” is an algorithm.
Waymo’s slow, data-driven expansion seeks to build trust through demonstrable safety metrics and transparent reporting. In contrast, Tesla’s more aggressive software-rollout strategy has drawn both praise for innovation and criticism for perceived risk.

Future Outlook: Convergence or Divergence?
Looking toward the late 2020s, several scenarios emerge for how the Waymo–Tesla rivalry might evolve.
Coexistence of Models
It is plausible that:
- Waymo dominates tightly regulated, high-stakes urban cores with controlled, fully driverless fleets.
- Tesla (and perhaps other OEMs) provide semi-autonomous or eventually fully autonomous capabilities for personal vehicles, more focused on suburban and intercity travel.
- Other players—traditional automakers, tech companies, and mobility startups—fill niche roles such as logistics, shuttles, or campus-style AVs.
Convergence in Technology
Over time, we may see convergence:
- Vision-based systems adopting more mapping and structured priors.
- Lidar-heavy systems leveraging more end-to-end learning and simulation.
- Standardization of safety metrics, test protocols, and incident reporting across the industry.
If this happens, competitive advantage may shift less to raw tech and more to:
- City relationships.
- Regulatory track records.
- User experience and ecosystem integration (payments, multimodal transport, accessibility).
Urban Transformation
The medium-term impact on cities could include:
- Reduced parking demand as fleets circulate continuously.
- Changes in land use as some parking lots and garages become available for redevelopment.
- New mobility patterns blending robotaxis, micromobility, and public transit.
Waymo’s early move into cities like Minneapolis, Tampa, and New Orleans ensures that it will not merely react to these transformations—it will help shape them.
Conclusion
Waymo’s accelerated expansion into new cities ahead of Tesla’s awaited robotaxi launch is a strategic race to define the future of autonomous mobility. By prioritizing safety, multi-modal sensing, and tight integration with local regulators, Waymo is assembling a mosaic of operational domains that collectively test its technology across a rich spectrum of real-world conditions.
Tesla, for its part, continues to push a bold, software-centric vision that could, if successful, unleash a vast, decentralized robotaxi network almost overnight. The collision of these models—centralized fleets versus owner-operated autonomy, lidar versus cameras, geofenced precision versus global generalization—will shape not only who wins market share, but how cities evolve and how societies perceive AI systems that literally steer our daily lives.
In the near term, the winner will not be determined solely by clever neural architectures or sensor choices. It will hinge on trust, regulation, operational execution, and the ability to turn complex, evolving cityscapes into safe, reliable, and accessible autonomous mobility networks. Waymo’s quiet land grab in Minneapolis, Tampa, New Orleans, and beyond suggests it intends to be in that conversation long before any robotaxi “tsunami” arrives.
References / Sources
- Waymo Official Blog – https://blog.waymo.com
- Waymo Safety Report – https://waymo.com/safety/
- National Highway Traffic Safety Administration (NHTSA) – Automated Vehicles for Safety – https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety
- U.S. Department of Transportation, Automated Vehicles – https://www.transportation.gov/AV
- IEEE Spectrum – Autonomous Vehicles Coverage – https://spectrum.ieee.org/transportation/advanced-cars
- SAE International – Taxonomy and Definitions for Terms Related to Driving Automation Systems (J3016) – https://www.sae.org/standards/content/j3016_
- NASA/JPL-Caltech Image Archive – https://images.nasa.gov
- Wikimedia Commons – Waymo Media – https://commons.wikimedia.org/wiki/Category:Waymo
- NextBigFuture – Autonomous Vehicles and Robotaxis Coverage – https://www.nextbigfuture.com
